
CoreXY- und Hbot-Struktur im 3D-Drucker
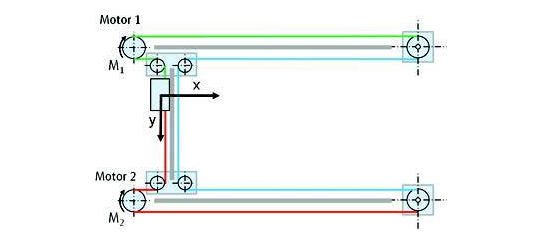
Der 3D-Drucker mit CoreXY-Struktur ist in der Abbildung dargestellt:

Der 3D-Drucker mit Hbot-Struktur ist in der Abbildung dargestellt:

Die CoreXY-Struktur wird in 3D-Druckern nicht häufig verwendet. Im Vergleich zu 3D-Druckern, die auf einer kartesischen Struktur basieren, bietet es weitere Vorteile. Interessant sind auch die beiden Förderbänder dieser Maschine. Sie scheinen sich zu kreuzen, befinden sich jedoch tatsächlich auf zwei Ebenen übereinander. Auf dem Wagen sind zwei Schrittmotoren installiert, die sich in X- und Y-Richtung bewegen, wodurch die Bewegung des Wagens präziser und stabiler wird.
Das Prinzip von CoreXY besteht darin, die Bewegung von XY durch zwei Motoren gleichzeitig zu steuern. Wenn sich der linke und der rechte Motor in derselben Richtung befinden, bewegen sie sich zur X-Achse, und wenn sich die beiden Motoren in umgekehrter Richtung befinden, bewegen sie sich zur Y-Achse. Durch die gleichzeitige Wirkung von zwei Motoren ist die Kraft stabiler als ein einzelner Motor, der eine Achse steuert, und sie kann auch das Gewicht eines Motors auf der XY-Plattform reduzieren.

Hbot-Struktur In der Draufsicht ähnelt der XY-Bewegungsmechanismus der Maschine dem Buchstaben „H“. Anders als die Querachsen-, I3- und Makerbot-Maschinenstruktur ist die Hbot-Struktur schnell, ohne dass sich der X-Achsen-Motor zusammen bewegt, und sie kann kleiner gemacht werden und die Druckfläche ist höher.
CoreXY- und Hbot-Strukturen sind übliche zweiarmige parallele Strukturen. Unabhängig davon, ob die XY-Bewegung das Zusammenwirken von zwei Motoren erfordert, wird sie als parallel bezeichnet.
Es gibt drei Hauptunterschiede zwischen der CoreXY- und der Hbot-Struktur:
1. Abhängig von der Installation des Schiebereglers kann der CoreXY-Strukturschieberegler mit zwei Riemenschichten verbunden werden. Der Grund dafür ist, dass sich der obere und der untere Riemen in die gleiche Richtung bewegen, während der Hbot-Strukturschieber nur mit einer Schicht (nach oben / unten) verbunden werden kann. Der Grund ist, dass sich der obere und der untere Riemen in entgegengesetzte Richtungen bewegen.
2. Der Wicklungsweg des Riemens. Das Merkmal der Hbot-Struktur ist, dass die Wicklung sehr einfach ist und nur ein Band für den gesamten Kreis benötigt wird und sich auf einer ebenen Fläche befindet. Diese Art von Hbot bringt jedoch auch strukturelle Probleme mit sich, wie in der Abbildung gezeigt:

Die CoreXY-Struktur erfordert zwei Riemen. Da die Riemen gekreuzt sind, müssen sie in zwei verschiedenen Ebenen installiert werden. Die komplexe Struktur bringt auch einige strukturelle Vorteile mit sich, wie in der Abbildung gezeigt:

Die Kraft der Querstange ist unterschiedlich. Zunächst müssen Sie das Prinzip der Kraftanalyse erläutern. Erstens ist der Gürtel ein flexibles Material. Das flexible Material kann nur Zugkraft, aber keinen Schub bereitstellen. Mit diesem Prinzip können Sie die Kraft jedes Punktes analysieren. Wenn sich hbot entlang der y-Achse des Schiebers bewegt, haben zu diesem Zeitpunkt die beiden Riemenscheiben auf der unteren Schicht des Strahls keine Leistung. Weil der Riemen zu diesem Zeitpunkt die Riemenscheibe drückt und der Riemen keinen Schub liefern kann. Die beiden oben genannten werden gezogen, so dass Kraft vorhanden ist, sodass der Strahl, der sich entlang der y-Achse bewegt, durch Kraft ausgeglichen wird, wie in der Abbildung gezeigt:
Wenn sich der Schieberegler entlang der X-Achse bewegt, sind die mit derselben Analysemethode erzielten Ergebnisse in der folgenden Abbildung dargestellt:
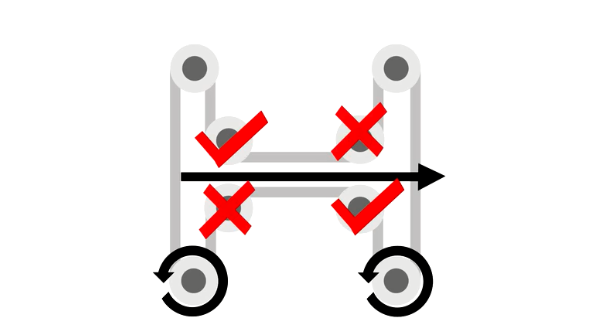
Es kann festgestellt werden, dass die Kraft des Trägers nicht in einer geraden Linie liegt, und es kann festgestellt werden, dass die Kraft des Trägers nicht in einer geraden Linie liegt, wodurch ein Drehmoment erzeugt, die Spur zusammengedrückt und vertikal beeinflusst wird.
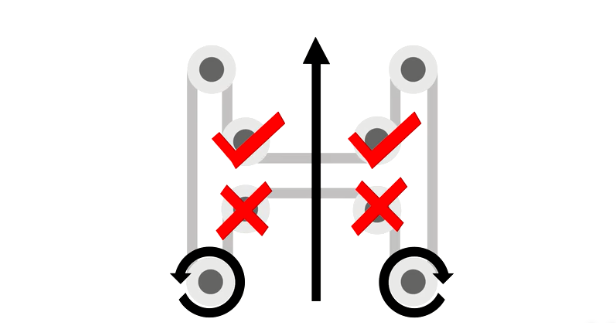
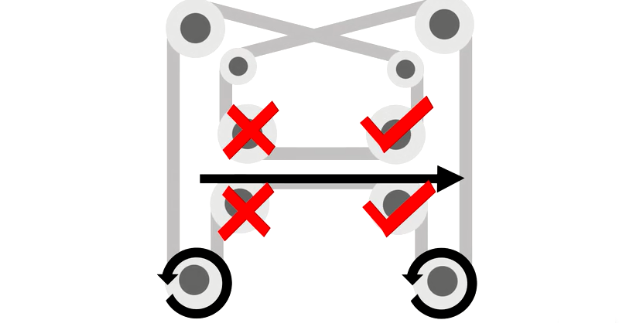
In der CoreXY-Struktur ist die Kraft auf die Bewegung entlang der Y-Achse gleich, die Kraft ist zu diesem Zeitpunkt auf einer geraden Linie, so dass die XY-Bewegung und die Kraft auf den Balken ausgeglichen sind, während die Kraft auf die X- Die Achse ist in der Abbildung dargestellt:
Motor Einbaulage
Theoretisch wird Hbot im tatsächlichen Gebrauch normalerweise auf derselben Seite installiert, solange sie auf beiden Seiten des Trägers installiert sind.
Das sieht schöner aus. Es gibt jedoch mehr Auswahlmöglichkeiten für die Motorinstallationsposition der CoreXY-Struktur.
Häufige Probleme und Lösungen
1. Der Riemen ist zu lang, die Maschine ist zu groß und der Riemen ist zu lang, um große Verformungen zu verursachen. Die Lösung besteht darin, einen dickeren und breiteren Riemen zu verwenden und ihn so fest wie möglich zu spannen.
2. Hbot-Struktur-Spannungsproblem, die erste Lösung besteht darin, die Breite des Trägers und den Momentarm zu verringern. Methode 2: Verwenden Sie hochfeste Schieber und Schienen auf beiden Seiten des Trägers, um die Verformung zu verringern.
Mit diesen beiden Druckertypen kann ein Hochgeschwindigkeits- und Präzisionsdruck erzielt werden. Die Installation ist relativ einfach und die Kosten sind nicht hoch.